Condivido questo test di confronto tra Reach M+ montato su UAV e Reach Rs2 in modalità Base per correzione RTK , spero che sia una lettura interessante.
*Il test prevede di valutare le differenze tra i dati ottenuti nelle diverse modalità di acquisizione.

Per prima cosa ho utilizzato RS2 come base e Reach RTK come rover per fornire le coordinate a Reach RTK. Quindi ho elaborato il processo due volte:
-RS2 come base e Reach M+ su UAV.
-Reach RTK come base e Reach M+ su UAV.
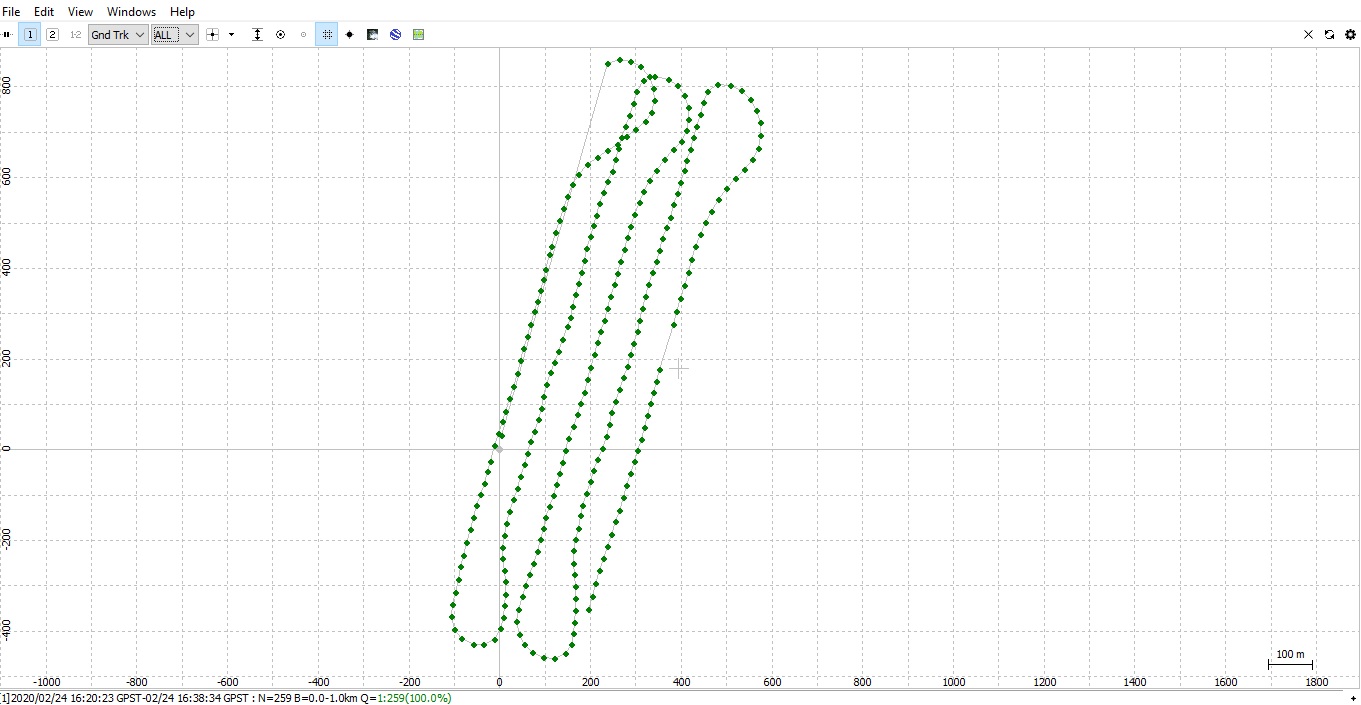
Per entrambe le elaborazioni tutte le immagini hanno qualità Q=1 e il numero di immagini sono pari al numero di eventi.
Nota: Lo scopo del test era confrontare i risultati di entrambe le basi.
Le differenze tra le 2 elaborazioni sono le seguenti:
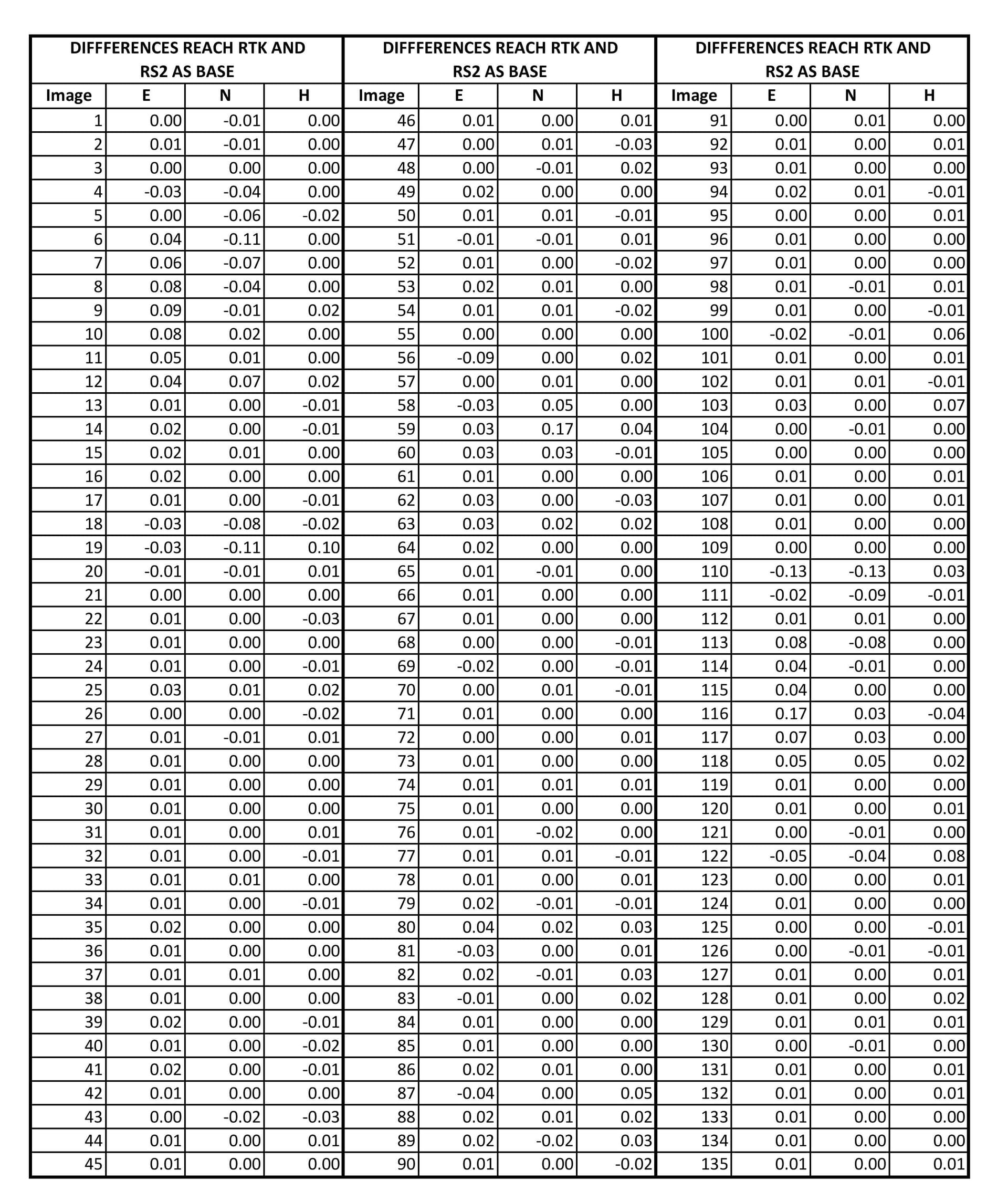

Sembrano ottimi risultati. Sarebbe stato interessante se alcuni degli eventi della base Reach RTK fossero in Float in modo da confrontare con RS2, ma le qualità degli eventi è tutto in FIX . Ad ogni modo la distanza massima tra l’UAV e la Base non era superiore a 1 Km, quindi p i risultati sono stati quelli attesi.
Sceglierò un M2 quando sarà disponibile per avere Base-Rover L1/L2.